
Visão geral
A ponte rolante, comumente conhecida como "condução", é um tipo de maquinaria de elevação amplamente utilizada em empresas industriais e de mineração, seu mecanismo operacional é composto por três sistemas de condução basicamente independentes, sistema de condução de carro, sistema de condução de gancho, inversor K-DRIVE para o acima dos três sistemas de direção reformados com sucesso, o seguinte descreve principalmente o processo de transformação do sistema de direção antes e depois do sistema de caminhada.

Esquema Vantagens
- Controle vetorial de malha aberta de corrente orientada a campo, variáveis de motor totalmente desacopladas, grande torque de baixa frequência, resposta rápida, etc;
- KD600 adota o modo de controle vetorial de malha aberta livre PG e o modo V/F vetorizado e amplifica a configuração do nível de potência da primeira marcha;
- Faixa de frequência: configuração de segmento de 0,5-600 Hz, ajuste contínuo contínuo;
- Faixa de tensão de trabalho: 380V ± 20%, e a tensão do barramento cai para 360VDC instantaneamente para operação sem problemas;
- Capacidade de sobrecarga: 150% da corrente nominal, 1 minuto permitido; Corrente nominal de 200%, 1s permitido;
- Características de torque: torque de partida, superior a 2 vezes o torque nominal; Torque de baixa frequência, maior que 1,6 vezes o torque nominal em 1Hz; O torque de frenagem é maior que o torque nominal.
Características operacionais
- O mecanismo de elevação do guindaste possui um grande torque inicial, que geralmente excede 150% do torque nominal. Se sobrecarga e outros fatores forem considerados, pelo menos 200% do torque nominal deverá ser fornecido durante o processo de partida e aceleração;
- Quando o mecanismo de elevação desce, o motor estará no estado de geração de energia regenerativa e deverá ser frenagem de consumo de energia ou feedback regenerativo para a rede;
- A carga do mecanismo de elevação muda drasticamente quando o objeto levantado sai ou toca o solo, e o conversor de frequência deve ser capaz de controlar a carga de impacto suavemente;
- Como a velocidade de deslocamento do mecanismo de deslocamento dianteiro e traseiro do guindaste não é alta durante o projeto mecânico, o conversor pode ser usado para velocidade excessiva adequada para melhorar a eficiência de trabalho.
Diagrama de fiação simples
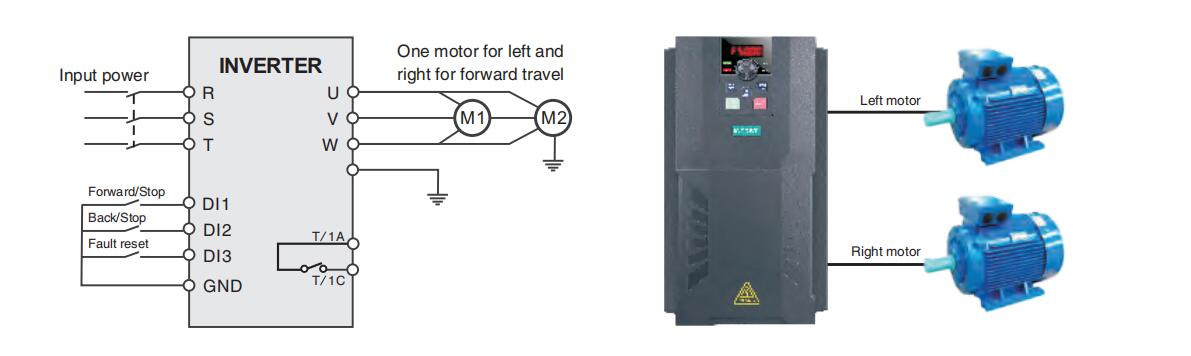
Parâmetro definidong e descrição(parâmetros de deslocamento do motor esquerdo e direito)
| Parâmetro | Explicar | Configuração de parâmetros | Explicar |
| P0-00=0 | Controle de FV | P5-00=1 | avançar |
| P0-04=1 | Parada inicial do terminal externo | P5-01=2 | realizar mais tarde |
| P0-06=1 | Configuração de frequência digital | P6-00=2 | Saída de falha do relé 1 |
| P0-14=60,00 | Frequência máxima | P4-01=1,6KW | Potência do motor conectado |
| P0-16=60,00 | Frequência limite superior | P4-02=380V | Tensão nominal do motor |
| P0-11=60,00 | Frequência de configuração digital | P4-04=3,3A | Corrente nominal do motor |
| P0-23=3,0s | Tempo de aceleração | P4-05=50 Hz | Frequência nominal do motor |
| P0-24=2,0s | Tempo de desaceleração | P4-06=960R/min | Velocidade nominal do motor |
| Nota: Quando um conversor de frequência for usado com dois motores, é altamente recomendável instalar um relé térmico correspondente na extremidade frontal de cada motor para proteger cada motor. | |||
Análise do efeito da operação
O conversor de frequência da série KD600 realizou a transformação de conversão de frequência no sistema de deslocamento, e o efeito de transformação é relativamente ideal, mostrado principalmente em:
- São realizadas partidas suaves e paradas suaves durante a inicialização, o que reduz o impacto na rede elétrica;
- Após a utilização do conversor de frequência, o contator de mudança original e o resistor regulador de velocidade são omitidos, o que não só economiza o custo de manutenção, mas também reduz o tempo de inatividade para manutenção, aumentando assim a produção;
- Quando o gancho principal funciona em 5 Hz ~ 30 Hz, o efeito de economia de energia é muito óbvio;
- O conversor de frequência é usado para controlar o deslocamento dianteiro e traseiro, e a série de mecanismos de deslocamento esquerdo e direito pode realizar o trabalho de sobrefrequência. Sob a premissa de garantir a segurança, a eficiência do trabalho é bastante melhorada e a carga de trabalho de manutenção do equipamento móvel devido à substituição frequente dos contatores CA também é reduzida.
Observações finais
O conversor de frequência é usado para controlar o movimento dianteiro e traseiro e a série de mecanismos de movimento esquerdo e direito, que podem realizar trabalhos de overclock, melhorar significativamente a eficiência do trabalho sob a premissa de garantir a segurança e também reduzir a carga de trabalho de manutenção do equipamento de condução devido a substituição frequente de contatores CA.
Local de aplicação

Horário da postagem: 17 de novembro de 2023